Communications Protocols for Grid-EV Integration
In this article, we explore why vehicle-to-grid integration (VGI) is vital, the difference between V1G and V2G, and the need for communications deployment models for VGI, and selecting a vehicle-to-grid integration communications protocols.
But first a primer on EVs and their infrastructures.
Vehicles Moving from Grid Assets to Loads
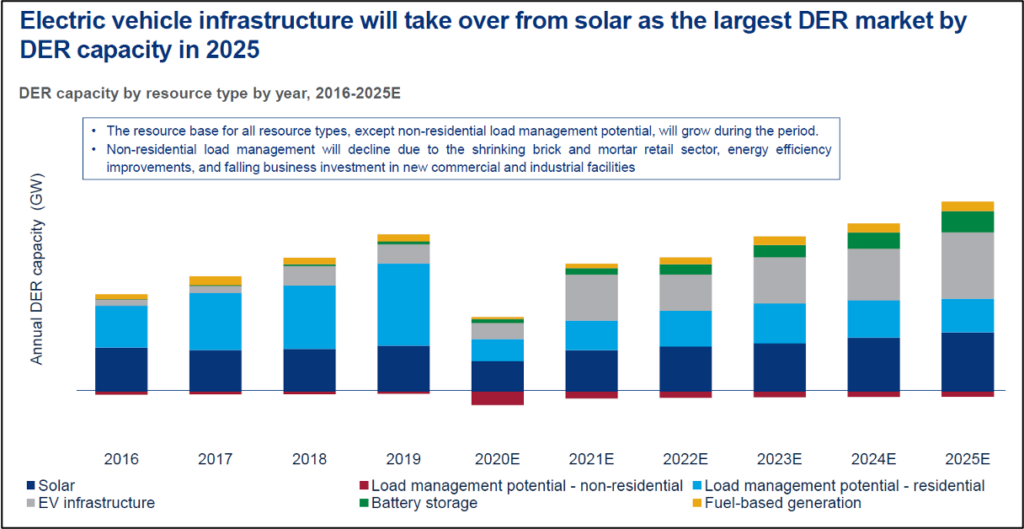
Wood Mackenzie (a global energy, chemicals, renewables, metals, and research consultancy group) predicts that EV infrastructure investments will overtake solar as the largest DER (Distributed Energy Resources) market by 2025. Monies invested in building and installing wiring electric vehicle charging stations (EVSE) and their management will exceed today’s solar investments. Eventually, vehicles will serve as grid assets instead of loads, which underscores the case for vehicle-to-grid integration.
Problems of “Use Case Zero”
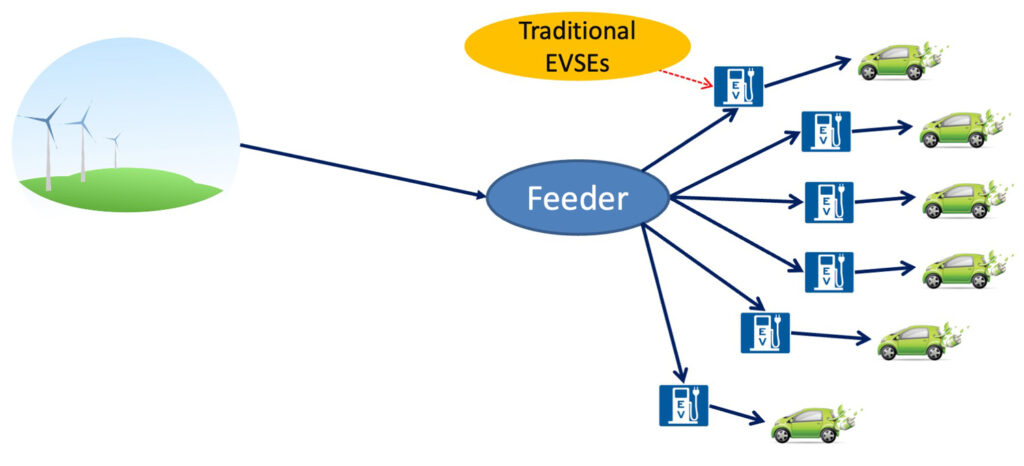
When a charging station and inverter work without grid operator interactions, we have a Use Case Zero configuration, where the EV charging remains unmanaged. This creates the potential for demand spikes or “duck curves” as seen in California, which occurs when everyone starts charging at the same time in the evening and solar generation ramps down. This, in turn, stresses feeders resulting in voltage or frequency instability.
Vehicle-to-Grid Integration
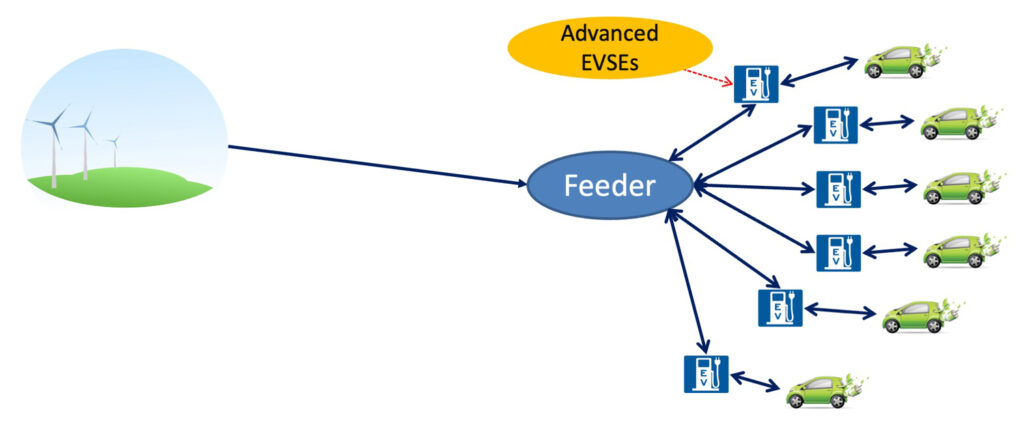
Vehicle-to-Grid integration allows an EV’s charging cycle to be managed and, if capable, to export power from the EV battery back to the grid. By establishing communications to electric vehicle charging stations and to EVs, grid operators will be able to signal when the best time(s) to charge (or not charge) and/or export would be. This means one can change charging times or stagger them to mitigate demand spikes like the duck curve. One can also provide local feeder support for frequency and voltage, if necessary, on the grid. Easy to implement, managing charge times only or V1G, benefits both grid and vehicle owners but lacks energy or power support for the grid. V2G on the other hand is basically a bi-directional EV or EV charging station that allows one to specify parameters like charging and export times, power settings, etc.
Deployment Models
There are several deployment models, and each is important when selecting communications protocols for either V1G or V2G applications.
The demand response model–often implemented by a DR Aggregator–can be used to manage individual or a network of charging stations directly or through a building or energy management system (EMS). The DR Aggregator receives requests for demand curtailment from the distribution utility and determines which demand assets under its control, including EV charging, are optimum for meeting the utility request.
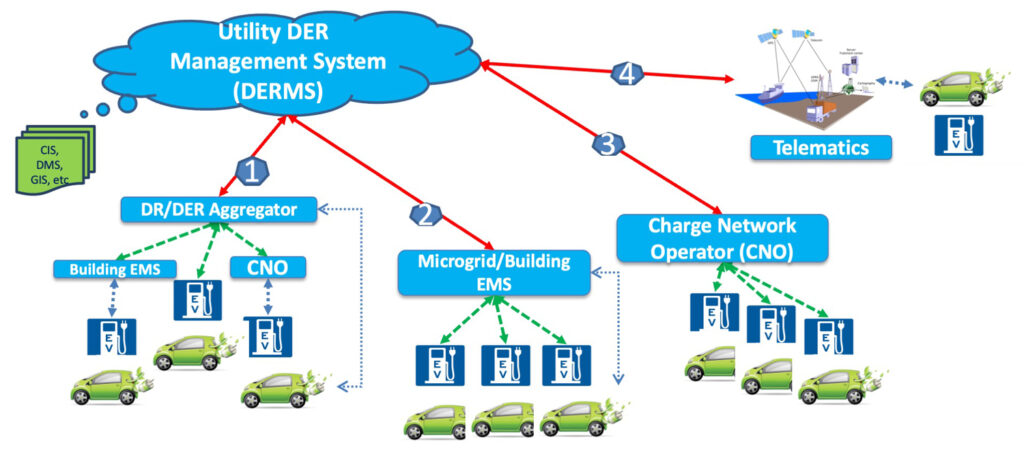
Another deployment model is often used in a campus, microgrid, or building complex. It provides direct communications between the utility DER management system and the facility/Microgrid controller to manage the DER resources under its control. Situated in a local facility, this model employs a single point of electrical interconnection, which is essentially a single meter between the utility and the facility. A single communications interface between the utility and the facility controller communicates the DER management requests and responses.
Still another model goes directly to a charge network operator (CNO) who solely manages a network of charging stations. These could be fleets, in residences or commercial buildings, or public parking lots. Communications is directly from the utility DERMS (Distributed Energy Resources Management System) via the CNO which makes actual charging/discharging decisions and handles communications downstream to the charging stations with EVs.
Finally, the auto industry has developed advanced telematics which can control EV charging/export behavior. Utilities can communicate to a cloud-based system, which then communicates directly to EVs through the EV OEM’s proprietary telematics network. This opens up a variety of possibilities for how to manage V1G or V2G applications.
V1G Protocols
The various V1G standard protocols (as opposed to vendor proprietary protocols) for charge management allow for messaging between grid operators and EVs. This includes exchanging information about status, charge times, and/or rates, perhaps even time-of-use rates or dynamic rates. At this point, the utility or the grid operator provides information, incentives, or commands for the EV charging station and EVs for optimum charging times to an aggregator, CNO, or EMS, or directly to the charging station or EV itself.
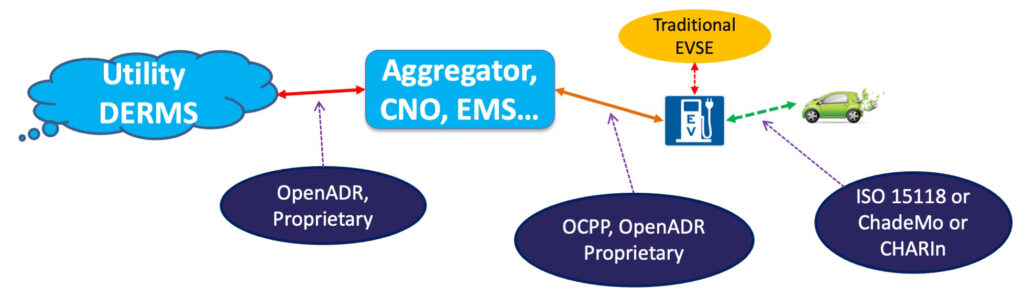
An OpenADR protocol is efficient, especially for V1G applications. It’s used by multiple utilities globally and by over 20 EV charging stations vendors or CNOs that manage them.
For communications between EVs and EV charging stations, the ISO 15118 standard protocol is emerging as a leading global standard. The EV asks the charging station to turn the power on or off. There are other similar protocols in use between EVs and charging stations, including proprietary links.
Two V2G Communications Models
Currently, there are two types of V2G models. DC V2G EVSEs have bi-directional inverters and can manage power flows both to and from the EV. This is considered a DER from a utility perspective. The utility DERMS communicates to the aggregators, CNO, or EMS, which then communicates to the charging station and manages the charging and export applications. Since it’s bi-directional, it can draw power from the EV’s battery and execute the grid settings needed to operate as a grid DER.
While multiple communications protocols are currently available, IEEE 2030.5 or CSIP is preferred and mandated in California for DER (including V2G) applications. And because the utility DERMS will use it to manage inverter-based DERs, the first leg to aggregators, CNO or EMS could be 2030.5.
OpenADR is a workable protocol for these communications as well, but it falls short in managing smart inverter settings. There could also be proprietary protocols. Between the aggregators, CNO, EMS, and the charging station, 2030.5 can be introduced because it’s already being used upstream. Still, conversion or translation to OCPP or OpenADR could be used in applications that don’t need sophisticated inverter management. While the IEEE 2030.5 to OCPP interface may well be implemented by a CNO, we have yet to see IEEE 2030.5 interfaced downstream with OpenADR. In fact, the reverse is more likely: OpenADR would be the protocol used between the DERMS and Aggregator and then translated into IEEE 2030.5 messages for communications to the inverters themselves.
While the protocols between charging stations and EVs mentioned above will work, it’s different with V2G AC communications since the EVs themselves have a bi-directional inverter rather than the EVSE. Charging stations can pass along AC current without the need for an AC to DC inverter. In this case, EVs can take AC and convert it to DC for battery charging or export AC to the charging station to pass on to the grid.
Role of Charging Station
As the interface to the grid and its management system, charging stations play a critical role. In V2G AC or DC, grid support settings reside on these stations, are transferred to the EV, and subsequently authorize the EV to discharge because the stations remain as a fixed, interconnected DER point in the grid. This allows the utility to specify how the inverters will behave. The SAE J3072 standard specifies how to implement V2G AC. It mandates IEEE 2030.5 between the charging station and the EV or SunSpec Modbus, depending on whether it’s a light- or heavy-duty vehicle. For V2G-DC, the EVSE’s must meet CA Rule 21 which requires both IEEE 2030.5 CSIP and UL 1741 SB (starting in mid-2022) certification. Once the V2G-DC EVSE has the information it needs and an appropriate connected EV, the communications between the EVSE and EV could use ISO 15118 or alternative equivalent protocol.
Choosing the Right Protocol
In selecting a protocol for EV charging infrastructure management by utilities, first understand the detailed messaging requirements that will be sent between which entities. There are specific things to consider in terms of administration, enrollment, asset owners, DER settings, prices, and events. If a time-of-use or critical peak pricing program has been structured, or real-time pricing or events have been set up, reporting capabilities and monitoring will be required. One may also wish to target and manage groups of EVs. There may be some EV specific messages like state of charge, start and end times, ramping, charge rate, etc. On the horizon, there may be more transactive energy for V1G and V2G, which involves bids and negotiations between different systems.
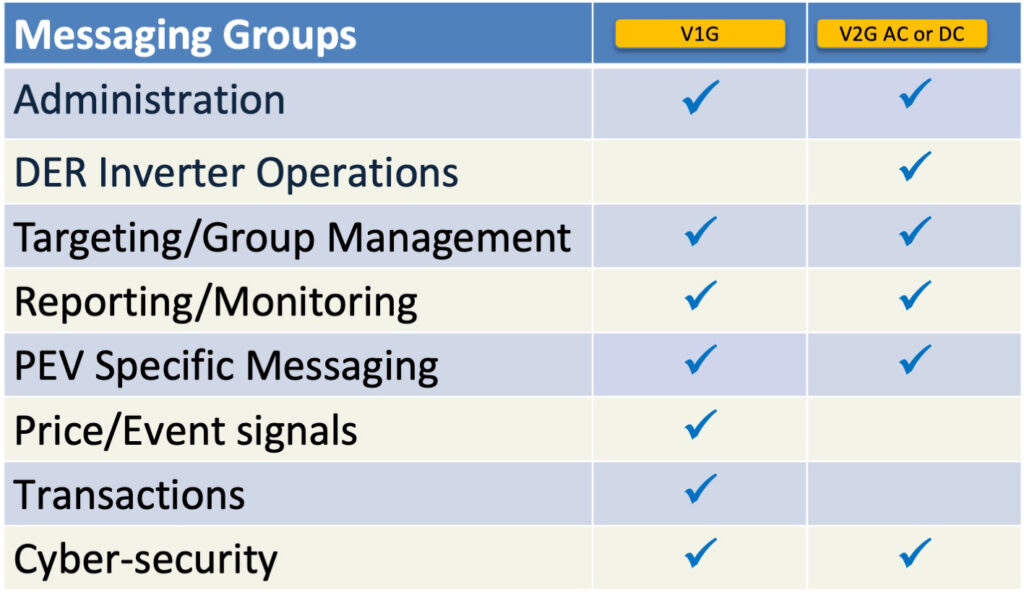
We also must also consider how protocols deal with various message groups. OpenADR, for example, is robust, except when dealing with DER inverter operations and transactions. IEEE 2030.5 is strong everywhere except on the transaction side.
OCPP fails to adequately address several things–like DER Inverter Operations or Targeting and Group Management or EVSE-EV communications. And two protocols are needed to manage administration, Reporting/Monitoring, etc – OCPP and then ISO 15118 or equivalent. The same would apply to 15118, which is a narrowly defined protocol that only applies between the charging station and the EV.
IEEE 1547-2018 is noteworthy in that it changes the business of scaling DER integration in North America. 1547-2018 is an interconnection standard that US utilities are required to mandate. It deals with any device exporting energy to the grid., including bi-directional inverter-based DER, solar storage, and V2G applications. These systems must meet 1547 standards in order to export power to the grid. Wind and solar farms with inverter interconnections, generators, and other interconnected interfaces are also subject to 1547.
This standardizes both the inverter functions and the capability to support standard communications.
Overall, several protocol selection factors must be considered:
- Are products available using the protocols one wishes to use?
- Are effective conformity assessment tools available?
- Do the protocols meet the needed requirements?
- How mature is the protocol and its ecosystem? Are jurisdictions already using them?
- Have adoption mandates for the protocol been specified?
- Are application-specific profiles and certification programs available? What is the quality of the certification program(s)?
- If a protocol is selected, can neighboring use cases be performed? If one starts with a V1G case, can one migrate to V2G without switching to another protocol?
- Has cybersecurity (a critical factor) been properly addressed?
- If multiple protocols are needed between the DERMS and the EV or EVSE, have the added complexity and implementation costs been considered?
In conclusion, both V1G and V2G are valuable to the grid, with V2G generating significant grid benefits. Today’s leading V1G, and V2G standard protocols include IEEE 2030.5, OpenADR, OCPP, and ISO 15118. Selecting the right protocol requires understanding the messaging requirements and analyzing them against the protocols. Although IEEE 1547 brings significant new standardization opportunities to V2G, work remains on how best to implement the EV charging communications Infrastructure.